Solution
# Imports
import numpy as np
import matplotlib.pyplot as plt
from datetime import datetime
import json
import copy
# Main qiskit imports
from qiskit import QuantumRegister, ClassicalRegister
from qiskit import QuantumCircuit, execute, Aer, IBMQ
# Error mitigation
from qiskit.ignis.mitigation.measurement import (complete_meas_cal,
CompleteMeasFitter,
MeasurementFilter)
# Utility functions
from qiskit.tools.jupyter import *
from qiskit.tools.monitor import job_monitor
from qiskit.providers.jobstatus import JobStatus
# We use ibmq_vigo
IBMQ.load_account()
backend = IBMQ.get_provider(hub='ibm-q', group='open', project='main').get_backend('ibmq_quito')
# Local simulator and vector simulator
simulator = Aer.get_backend('qasm_simulator')
def c1(R,t):
"""Returns the coherence factor in the amplitude damping channel
Args:
R (float): value of R = \gamma_0/\lambda
t (float): value of the time variable
Returns:
A float number
"""
if R < 0.5:
c1 = np.exp(- t / 2.0) * (np.cosh(t * np.sqrt(1.0 - 2.0 * R) / 2.0) + 1.0 / np.sqrt(1.0 - 2.0 * R) * np.sinh(t * np.sqrt(1.0 - 2.0 * R) / 2.0))
else:
c1 = np.exp(- t / 2.0) * (np.cos(t * np.sqrt(2.0 * R - 1.0) / 2.0) + 1.0 / np.sqrt(2.0 * R - 1.0) * np.sin(t * np.sqrt(2.0 * R - 1.0) / 2.0))
return c1
def amplitude_damping_channel(q, c, sys, env, R, t):
"""Returns a QuantumCircuit implementing the amplitude damping channel on the system qubit
Args:
q (QuantumRegister): the register to use for the circuit
c (ClassicalRegister): the register to use for the measurement of the system qubit
sys (int): index for the system qubit
env (int): index for the environment qubit
R (float): value of R = \gamma_0/\lambda
t (float): value of the time variable
Returns:
A QuantumCircuit object
"""
ad = QuantumCircuit(q, c)
# Rotation angle
theta = np.arccos(c1(R, t))
# Channel (notice the extra factor of 2 due to the definition
# of the unitary gate in qiskit)
ad.cu(2.0 * theta, 0.0, 0.0, 0.0, q[sys], q[env])
ad.cx(q[env], q[sys])
# Masurement in the computational basis
ad.measure(q[sys], c[0])
return ad
# We choose to add the initial condition elsewhere
def initial_state(q, sys):
"""Returns a QuantumCircuit implementing the initial condition for the amplitude damping channel
Args:
q (QuantumRegister): the register to use for the circuit
sys (int): index for the system qubit
Returns:
A QuantumCircuit object
"""
# Create circuit
ic = QuantumCircuit(q)
# System in |1>
ic.x(q[sys])
return ic
SHOTS = 8192
# The values for R and corresponding times
R_values = [0.2, 100.0, 200.0, 400.0]
npoints = 30
t_values = {}
for R in R_values:
t_values[R] = np.linspace(0.0, 6.0 * np.pi / np.sqrt(abs(2.0 * R - 1.0)), npoints)
# We create the quantum circuits
q = QuantumRegister(5, name="q")
c = ClassicalRegister(1, name="c")
## Indices of the system and environment qubits
sys = 1
env = 2
## For values of R and thirty values of t for each
circuits = {}
for R in R_values:
circuits[R] = []
for t in t_values[R]:
circuits[R].append(initial_state(q, sys)
+ amplitude_damping_channel(q, c, sys, env, R, t))
circuits[0.2][1].draw(output='mpl')
# Execute the circuits on the local simulator
jobs_sim = {}
for R in R_values:
jobs_sim[R] = execute(circuits[R], backend = simulator, shots = SHOTS)
# Analyse the outcomes
populations_sim = {}
for R in R_values:
populations_sim[R] = []
current_job_res = jobs_sim[R].result()
for i in range(npoints):
counts = current_job_res.get_counts(i)
if '1' in counts:
sm = counts['1']/float(SHOTS)
populations_sim[R].append(sm)
# Plot the results
fig_idx = 221
plt.figure(figsize=(10,12))
for R in R_values:
plt.subplot(fig_idx)
plt.plot(t_values[R], populations_sim[R], label=f"R = {R}")
plt.xlabel('t')
plt.ylabel('Population')
plt.legend()
fig_idx += 1
plt.grid()
# Calibration circuits
cal_circuits, state_labels = complete_meas_cal([sys], q, c)
# Run the calibration job
calibration_job = execute(cal_circuits, backend, shots=SHOTS)
# Run the circuits and save the jobs
jobs = {}
for R in R_values:
jobs[R] = execute(circuits[R], backend = backend, shots = SHOTS)
# Use the calibration job to implement the error mitigation
meas_fitter = CompleteMeasFitter(calibration_job.result(), state_labels)
meas_filter = meas_fitter.filter
# Analyse the outcomes
populations = {}
for R in jobs:
populations[R] = []
current_job_res = jobs[R].result()
for i in range(npoints):
counts = meas_filter.apply(current_job_res).get_counts(i)
if '1' in counts:
sm = counts['1']/float(SHOTS)
populations[R].append(sm)
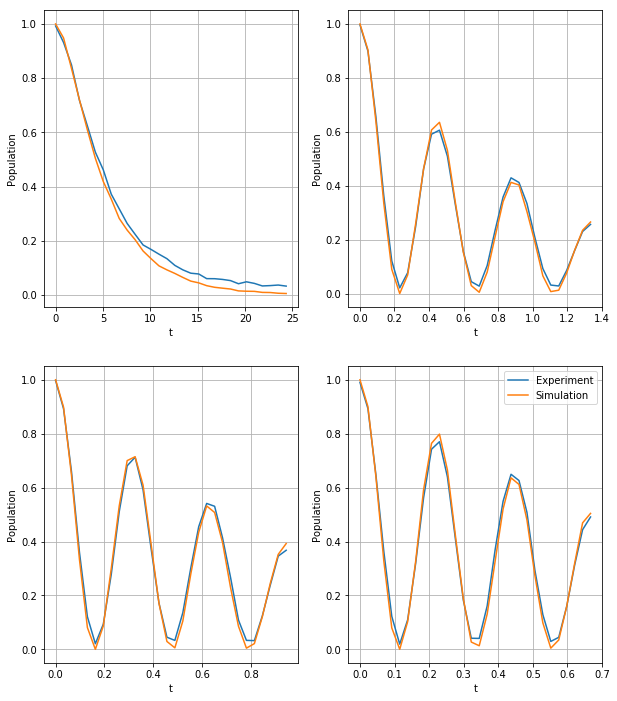
# Plot the results
fig_idx = 221
plt.figure(figsize=(10,12))
for R in R_values:
plt.subplot(fig_idx)
plt.plot(t_values[R], populations[R], label='Experiment')
plt.plot(t_values[R], populations_sim[R], label='Simulation')
plt.xlabel('t')
plt.ylabel('Population')
fig_idx += 1
plt.grid()
plt.legend();
def amplitude_damping_channel_witness(q, c, sys, env, anc, observable, R, t):
"""Returns a QuantumCircuit implementing the amplitude damping channel on the system qubit with non-Markovianity witness
Args:
q (QuantumRegister): the register to use for the circuit
c (ClassicalRegister): the register to use for the measurement of the system and ancilla qubits
sys (int): index for the system qubit
env (int): index for the environment qubit
anc (int): index for the ancillary qubit
observable (str): the observable to be measured
R (float): value of R = \gamma_0/\lambda
t (float): value of the time variable
Returns:
A QuantumCircuit object
"""
ad = QuantumCircuit(q, c)
# Rotation angle
theta = 2.0 * np.arccos(c1(R, t))
# Channel
ad.cu3(theta, 0.0, 0.0, q[sys], q[env])
ad.cx(q[env], q[sys])
# Masurement of the corresponding observable
if observable == 'xx':
ad.h(sys)
ad.h(anc)
elif observable == 'yy':
ad.sdg(sys)
ad.h(sys)
ad.sdg(anc)
ad.h(anc)
ad.measure(sys,c[0])
ad.measure(anc,c[1])
return ad
# We set the initial entangled state separately
def initial_state_witness(q, sys, anc):
"""Returns a QuantumCircuit implementing the initial condition for the amplitude damping channel with non-Markovianity witness
Args:
q (QuantumRegister): the register to use for the circuit
sys (int): index for the system qubit
anc (int): index for the ancilla qubit
Returns:
A QuantumCircuit object
"""
# Create circuit
ic = QuantumCircuit(q)
# System and ancilla in |\psi^+>
ic.h(q[sys])
ic.cx(q[sys], q[anc])
return ic
SHOTS = 8192
# The values for R and corresponding times,
# as well as the observables needed for the witness
observables = ['xx', 'yy', 'zz']
R_values = [0.2, 100.0]
npoints = 30
t_values = {}
for R in R_values:
t_values[R] = np.linspace(0.0, 6.0 * np.pi / np.sqrt(abs(2.0 * R - 1.0)), npoints)
# We create the quantum circuits
q = QuantumRegister(5, name="q")
c = ClassicalRegister(2, name="c")
## Indices of the system, environment and ancillary qubits
sys = 1
env = 2
anc = 3
## Two values of R and thirty values of t for each
## The witness requires measuring three observables per point
circuits = {}
for R in R_values:
circuits[R] = {}
for observable in observables:
circuits[R][observable] = []
for t in t_values[R]:
circuits[R][observable].append(initial_state_witness(q, sys, anc)
+amplitude_damping_channel_witness(q, c, sys, env, anc, observable, R, t))
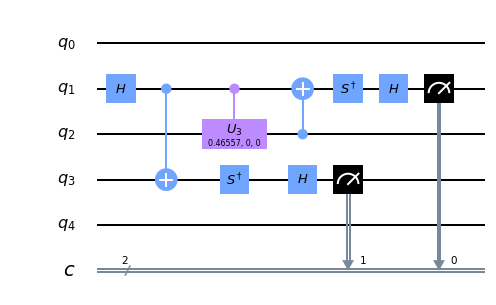
circuits[0.2]['yy'][1].draw(output='mpl')
# Execute the circuits on the local simulator
jobs_sim = {}
for R in R_values:
jobs_sim[R] = {}
for observable in observables:
jobs_sim[R][observable] = execute(circuits[R][observable], backend = simulator, shots = SHOTS)
# Analyse the outcomes
## Compute expected values
expected_sim = {}
for R in R_values:
expected_sim[R] = {}
for observable in observables:
expected_sim[R][observable] = []
current_job_res = jobs_sim[R][observable].result()
for i in range(npoints):
counts = current_job_res.get_counts(i)
expc = 0.0
for outcome in counts:
if outcome[0] == outcome[1]:
expc += counts[outcome]/float(SHOTS)
else:
expc -= counts[outcome]/float(SHOTS)
expected_sim[R][observable].append(expc)
## Compute witness
witness_sim = {}
for R in R_values:
witness_sim[R] = []
for i in range(npoints):
w = 0.25*(1.0+expected_sim[R]['xx'][i]-expected_sim[R]['yy'][i]+expected_sim[R]['zz'][i])
witness_sim[R].append(w)
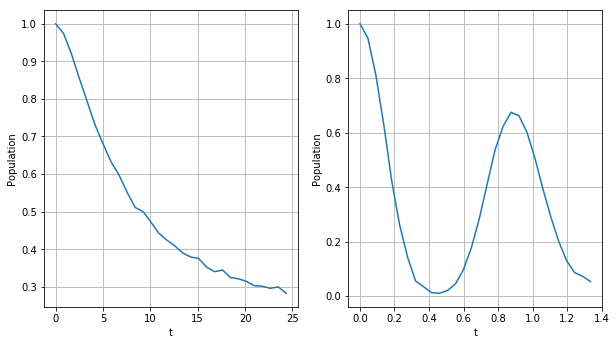
# Plot the results
fig_idx = 221
plt.figure(figsize=(10,12))
for R in R_values:
plt.subplot(fig_idx)
plt.plot(t_values[R], witness_sim[R])
plt.xlabel('t')
plt.ylabel('Population')
fig_idx += 1
plt.grid()
# Calibration circuits
cal_circuits, state_labels = complete_meas_cal([sys, anc], q, c)
# Run the calibration job
calibration_job = execute(cal_circuits, backend, shots=SHOTS)
# Run the circuits and save the jobs
jobs = {}
for R in R_values:
jobs[R] = {}
for observable in observables:
jobs[R][observable] = execute(circuits[R][observable], backend = backend, shots = SHOTS)
# Use the calibration job to implement the error mitigation
meas_fitter = CompleteMeasFitter(calibration_job.result(), state_labels)
meas_filter = meas_fitter.filter
# Analyse the outcomes
## Compute expected values
expected = {}
for R in R_values:
expected[R] = {}
for observable in observables:
expected[R][observable] = []
current_job_res = jobs[R][observable].result()
mitigated_res = meas_filter.apply(current_job_res)
for i in range(npoints):
counts = mitigated_res.get_counts(i)
expc = 0.0
for outcome in counts:
if outcome[0] == outcome[1]:
expc += counts[outcome]/float(SHOTS)
else:
expc -= counts[outcome]/float(SHOTS)
expected[R][observable].append(expc)
## Compute witness
witness = {}
for R in R_values:
witness[R] = []
for i in range(npoints):
w = 0.25*(1.0+expected[R]['xx'][i]-expected[R]['yy'][i]+expected[R]['zz'][i])
witness[R].append(w)
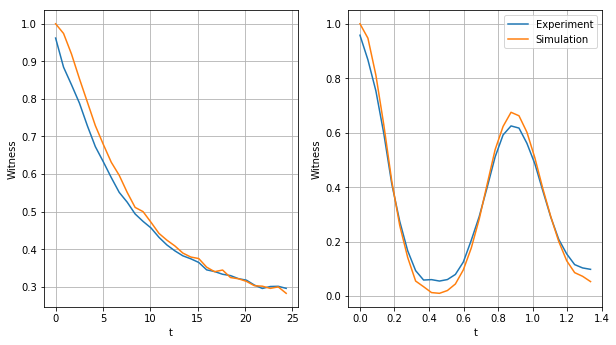
# Plot the results
fig_idx = 221
plt.figure(figsize=(10,12))
for R in R_values:
plt.subplot(fig_idx)
plt.plot(t_values[R], witness[R], label='Experiment')
plt.plot(t_values[R], witness_sim[R], label='Simulation')
plt.xlabel('t')
plt.ylabel('Witness')
fig_idx += 1
plt.grid()
plt.legend();